
X-ray vision is often mentioned alongside superheroes and their ability to see through objects. While thinking about what “X-ray vision” might mean through the eyes of Justin Posey, I couldn’t help but start a little experiment of my own… thus, Reaper Vision was born.
If you haven’t read about Nina—a tracker designed to detect signals rather than treasure—I encourage you to check out the post titled Into the Hunt: Building Tools for the Unknown before continuing. Inspired by the movie Elevation, this project scans the environment in ways the human eye cannot.
The Concept of Reaper Vision
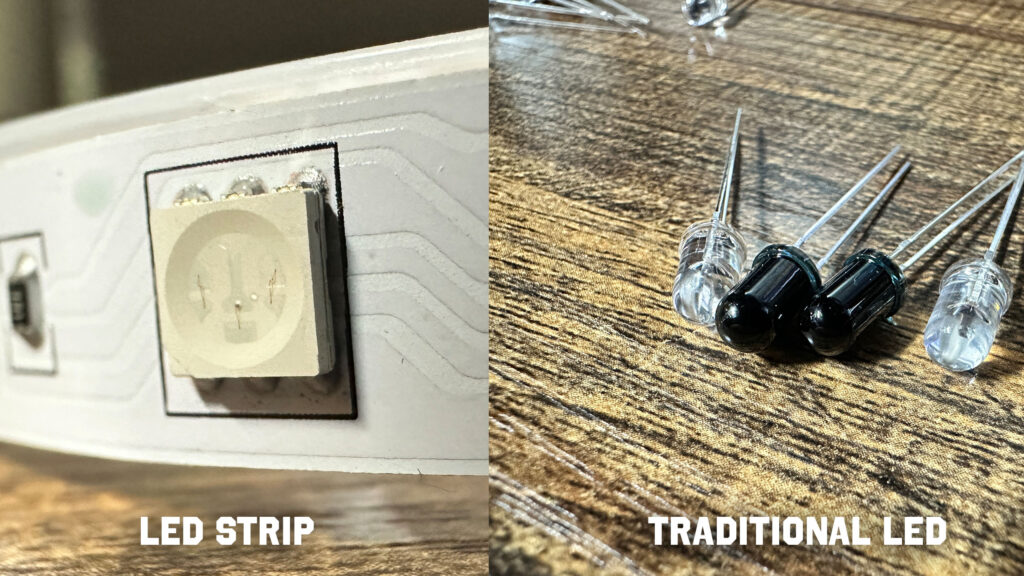
In the Gold & Greed series, Justin mentions he has many hobbies—one of them being his experimentation with infrared (IR) light. During that scene, a Raspberry Pi and an HQ camera module are on the table, and he’s soldering wires to an LED strip. My guess? He was aiming for a more water-resistant solution than traditional LEDs. Of course, your guess is as good as mine when it comes to how (or if) he’s actually using something like this in relation to the treasure.
Still, since Justin mentions this type of technology in the series, I decided to invest some effort into building a system capable of detecting it. Nina is the ears of this operation—Reaper Vision is the eyes.
Near-infrared (NIR) light can be detected using a filter on a camera lens. In basic night vision systems, filters are also used to reveal NIR, alongside light amplification. The idea behind Reaper Vision is to use a filtered camera to monitor an area at night over time. When it detects IR or standard light sources, it will trigger an alert, capture an image, outline the detected light source in its view, and save the image for later review.
In the slim chance that Justin does use some form of NIR, this project will be able to visually identify it. Camera systems that use NIR turn on the LEDs before taking a photo or capturing video. Also, for what ever reason there may be laser communication as some have mentioned, this would capture that as well. This system should be so sensitive, that once deployed, it would be able to pick up a quick flash or any light source up to about 1/8 mile away (maybe further).
In the future, I do plan on incorporating a laser range finder, tying the system into Nina’s GPS system and adding a rotating platform that allows the system to rotate 180 degrees. And… with a custom trained AI model, Reaper could be a helpful tool to monitor an area when the zombie apocalypse happens.
Building Reaper Vision
At its core, the system is relatively simple:
- A camera with a filter
- The ability to auto-calibrate based on ambient light
- A program that continuously monitors changes in the visual field
Ironically, all of this can be built using a Raspberry Pi and a camera module.
I fired up my laptop running DragonOS and got to work. Within 30 minutes, I had a working prototype. The system opens a live view of the camera and waits for the command to auto-calibrate based on the current lighting conditions. This step is crucial—Reaper Vision needs a baseline to determine what qualifies as a new or unexpected light source.
Once calibrated, the system monitors the camera feed. If there’s any shift in lighting, the software identifies the change, highlights the source, and logs the event for me to review—especially helpful if I’m asleep or otherwise not watching live.
Field Testing Reaper Vision
In a dark room, inside what I call my mad science laboratory, Reaper Vision works great. If you have every built something, you know you have to test it out before you think about deploying it in the real world. There would be nothing worse than getting all the way to my search area just to find out the system does not work as expected.
Tonight, is the night! I am going to be deploying Reaper Vision for its first real world test. Ok, Ok. It will be deployed to in my yard but its all about baby steps here.
I will make a new post about these tests. I have also decided to record the project since the beginning so be on the look out for videos soon.
Many times I’ve tried to think through the challenges of monitoring the hunt items and how they might suggest a very specific type of terrain, topography, or access funnel, with specific FOV and stability/reliability of optical sight lines. And how power consumption of monitoring systems could present challenges or limitations that might be helpful to keep in the back of mind while BOTG.
I have never considered reverse engineering via signal intercept, blown away by the creativity and it’s an intriguing concept.
Both seriously and light-heartedly, have contemplated using vehicles that would be very hard to identify, carrying no phone, fully covering body in generic garments/fabrics, wearing gloves, remaining silent, changing gait… essentially going on the offensive with concealment to flush out a response. Could seeing a ghost pop up on his feed be enough to trigger a reaction he knows would all but verify proximity? The guy might just be crazy enough to have thought of this, and somehow worked something into the hunt which quite literally requires you ‘take the mask off’, like there’s a voice activated switch, or an iris sensor, or maybe even a good old fashioned blood-ritual which springs the proverbial hidden chamber open.
At the end of FF, one or two scenes heavily imply there is or was at least one camera hidden in the trees that most folks might be blissfully unaware of it guarding the burial site. I wonder, is that camera still there? If yes, reverse engineering might be a boost in the effectiveness of the REAPER.
Your approach here is so cool, building a tool to detect a detection tool is next level. The best kind of bat-shit crazy. Thank you for sharing.
Ha. Thanks for leaving a comment. In my line of work (my day job) I work with LTE networks, trail cameras, sensors, GPS, and RF so it was natural for me to adjust my field tools to potentially help me see things that I would otherwise not see. I actually use a version of Reaper Vision for a lot of other applications now.
Crazy? Probably a little. Did it help? Welp… Prob not, but it was fun while BTOG.
If I ever get BOTG again, it will be running, monitoring, and watching. Version 2 is 360 degree is is crazy awesome. It actually turned into a complete off grid communication and asset tracker with some other not so public features that I now use almost daily with I am driving. It was a pretty cool project.
Thanks again.